 Zdroj: Robotic Systems Lab/YouTube
Zdroj: Robotic Systems Lab/YouTube
Magazín · Novinky · v pondělí 11. 10. 2021 19:47
Jak mohou virtuální překážkové dráhy pomoct skutečným robotům?
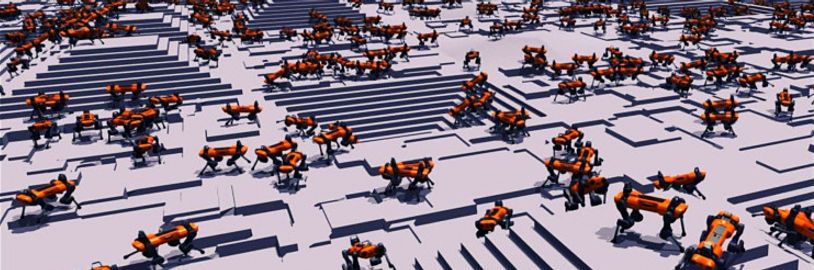
Simulace, ve které se nachází 4000 robotů podobných psům. Strojům to však může ukázat cestu, jak se naučit novým věcem. Tuto novou metodu vymysleli vědci z vysoké školy ETH v Curychu ve spolupráci s firmou Nvidia. Každý pohyb, který se virtuální robot naučí, se totiž použije k vylepšování algoritmu, jenž použije skutečný robot při práci.
V simulaci se stroje potýkají s výzvami jako jsou svahy, schody a různé nerovnosti vyskytující se v krajině. Vždy, když se robot naučil nějakou výzvu překonat, ji vědci udělali těžší a upravili program tak, aby byl důmyslnější. Robot byl schopen zvládat jakýkoliv terén po 20 minutách simulace. Ve stejném virtuálním prostředí mohou trénovat různé modely robotů, jmenovitě ANYmal, ANYmal B, ANYmal C, A1 a Cassie.
Nejjednodušší část tréninku byla zřejmě chůze po schodech, kterou roboti zvládali snadno. O něco složitější byly svahy, ale některé virtuální stroje se naučily, jak po nich sjíždět. Jakmile byl do skutečného robota ANYmal přenesen vyvíjený algoritmus, dokázal se pohybovat po schodech a blocích, avšak při vyšších rychlostech měl problémy. Vědci se domnívají, že nepřesnosti pramení z rozdílného vnímání senzorů v simulací ve srovnání s realitou.
Zdroj: Pixabay / Mizter_X94 NVIDIA hledá cestu mimo Zemi
Podobné cvičení pro roboty by mohlo vést k tomu, aby se stroje naučily nejrůznější užitečné věci, jako například třídění balíků, šití oděvů anebo sklizeň plodin. Projekt také ukazuje, jak důležitá může být simulace pro budoucnost umělé inteligence.
